
🔥Welcome to My Page!🔥
I am currently a first-Year Master student in the Department of Mechanical Engineering at Stanford University. I received my Bachelor degree in Robotics Engineering at the College of Mechanical and Electrical Engineering, Beijing University of Chemical Technology (BUCT). My research interests include soft robots, robot navigation, robot learning, medical mechatronics, and healthcare robots.
🔥 News
- 2023.04: 🎉🎉 Our poster Concentric Agonist-antagonist Robots for Neurosurgical Applications has been accepted as Best submission for lighting talk at RoboSoft2024: Soft Robotics Inspired Biology Workshop 2024!
- 2024.04: 🎉🎉 MOur paper on Sim2Real-RL soft robotic navigation has been accepted by ARSO 2024 to be held in Hong Kong!
- 2023.07: 🎉🎉 My first paper as a co-first author “Sim-to-Real Transfer of Soft Robotic Navigation Strategies That Learns from the Virtual Eye-in-Hand Vision” has been published on IEEE Transactions on Industrial Informatics!
- 2023.07: 🎉🎉 Our work “Sim-to-Real Segmentation in Robot-assisted Transoral Tracheal Intubation” win the Best Poster Award at ICRA 2023 Workshop!
- 2023.07: 🎉🎉 Our work “Domain Adaptive Sim-to-Real Segmentation of Oropharyngeal Organs” has been published on MBEC!
📝 Publications
Sim-to-Real Transfer of Soft Robotic Navigation Strategies That Learns From the Virtual Eye-in-Hand Vision
J. Lai, T.-A. Ren (Co-first author), W. Yue, S. Su, J. Y. K. Chan, and H. Ren
- Medical scene 3D reconstruction in SOFA Framework
- Soft robot modeling and navigation with SOFTROBOTS plugin
- Closed-loop soft robot navigation with that learns from the virtual eye-in-hand vision
- Supply Video| Paper
Domain Adaptive Sim-to-Real Segmentation of Oropharyngeal Organs
Guankun Wang, Tian-Ao Ren, Jiewen Lai, Long Bai, and Hongliang Ren
💬 Projects
Concentric Agonist-antagonist Robots for Neurosurgical Applications
Tian-Ao Ren, Zhongchun Yu, Brian Vuong, Antonio Meola, and Allison M. Okamura
- Develop a miniature end effector equipped with two CAARs, designed to carry out surgical actions as directed by a surgeon, through its end-mounted gripper.
- RoboSoft2024: Soft Robotics Inspired Biology Workshop 2024
- Best submission for lightning talks
- Poster
Wearable for High Precision Elbow Angle Measurement
- Motion Capture System to collect ground truth data of elbow angle
- Soft Sensor System to collect sensor data
- Design experiments to verify the accuracy of mapping method
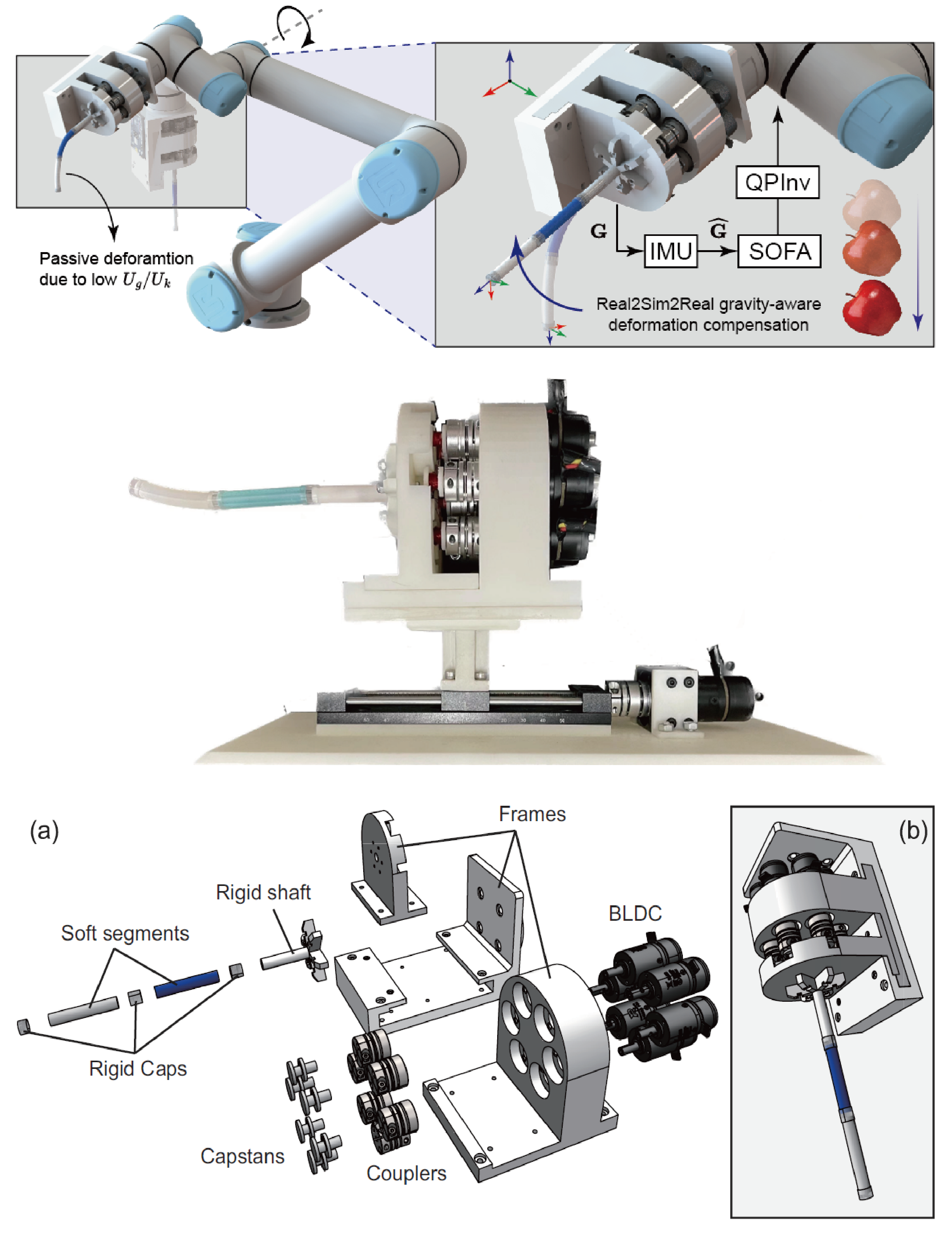
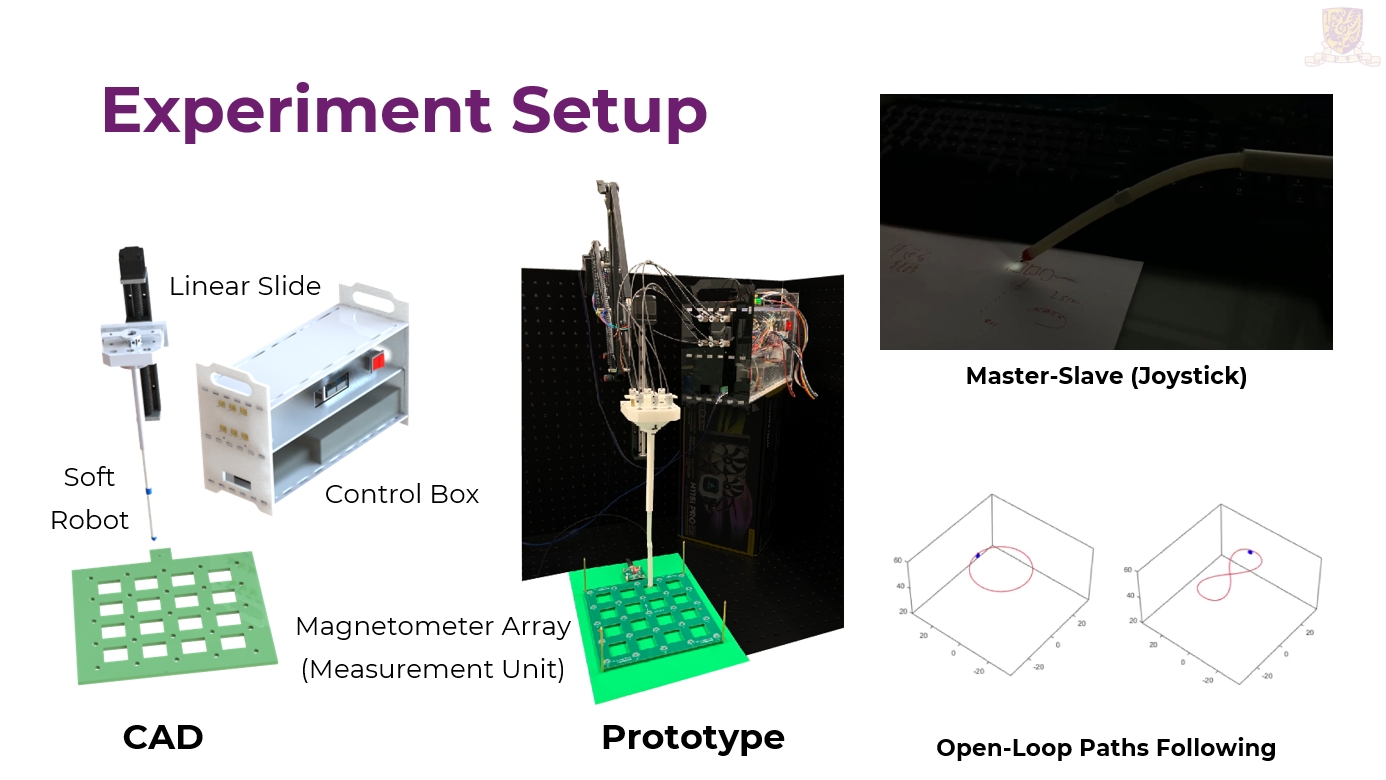
A SOFA-based Gravity-Aware Portable Soft Robot
- Designed a 7-driven soft robot: 6 cable-driven actuator and 1 Sliding actuator
- Work on simulation, design, embedded coding and communication to build a Sim2Real verify platform
- Build a real machine to verify the feasibility of the platform
- IMU-Gravity-SOFA-Real-machine Performance
A SOFA-based Sim2Real System that can Verify Soft Continuum Robot Fast
- Calibrate sim2real Gap
- Socket-UDP/CAN BUS/Serial Port to build the communication system
- Kinematics and dynamics of soft robots can be quickly verified
- Video Speed 15x
Floor Cruising with Dynamic Obstacle Avoidance
- Maximum speed of 2 m/s
- TEB algorithm for local planning
- Multi-sensor fusion positioning to increase localization accuracy
- Supply Video
ICRA2022 RoboMaster University Sim2Real Challenge
- Team 777 - on behalf of Beijing University of Chemical Technology (Third Prize)
- Use VINS-Mono location algorithm
- D435 + IMU mode to improve motion tracking performance and make up gaps in illumination changes
- Supply Video
Swarming Robot Navigation: Sim2Real Transfer
- Migrated multi-machine cooperative operation composite robot model in IsaacSIM
- High stability and obstacle avoidance ability
- Supply Video
Sim2Real Transfer of ARX-5s robot (a 6-DOF robotic arm)
Design and Characteristics of A Hydraulic Amplification-Based Soft-Exoskeleton Robotic Module
- Specially designed the casting mold to adapt to different application scenarios
- Simulated the deformation of soft beam with pneumatic-HASELs and the assembled soft gripper in SOFA
🎖 Honors and Awards
- 2023.07 Best Poster Award at ICRA 2023 Workshop
- 2023.07 Outstanding Graduates in Beijing
- 2021-2022 National Scholarship of China (TOP 0.2% in China)
- 2019-2020 Li Wen & Yang Yan Scholarship (TOP 1)
- 2020-2021 Jinfa Technological Scholarship (TOP 0.5% in College of Mechanical and Electrical Engineering)
- 2021-2022 First Prize Scholarship of BUCT
📖 Educations
- 2023.09 - 2025.07(expected), M.S., Mechanical Engineering, Stanford University, California, U.S.
- 2019.09 - 2023.07, B.Eng., Robotics Engineering, Beijing University of Chemical Technology, Beijing, China
💻 Internships
- 2024.04 - present, [Research Assistant] BDML, Stanford University, CA. Supervised by Prof. Mark Cutkosky, PI of BDML
- 2023.10 - 2024.03, [Research Assistant] Charm Lab, Stanford University, CA. Supervised by Prof. Allison Okamura, PI of Charm Lab
-
2023.01 - 2023.09, [Research Assistant] Shenzhen Research Institute, The Chinese University of Hong Kong, Hong Kong. Supervised by Prof. Hongliang Ren, PI of MMLab
-
2022.06 - 2022.12, [Summer Research Intern] Dept of Electronic Engineering, The Chinese University of Hong Kong, Hong Kong. Supervised by Prof. Hongliang Ren, PI of MMLab
- 2021.12 - 2023.05, [Research Intern], Institute of AI Industry Research (AIR), Tsinghua University, Beijing. Supervised by Prof. Guyue Zhou, PI of AIR DISCOVER Lab.